
初めに
こんにちは!情報技術開発(株)のETロボコン出場チーム「tadaima G4」です。
私たちtadaima G4は、2019年11月20日(水)に開催されたETロボコンチャンピオンシップ大会(以下、CS大会)のプライマリークラスに出場し、競技部門では3位入賞、モデル部門では見るべきモデル大賞を獲得することができました。
この結果に大きく貢献したのが、私たちtadaima G4が考案した、画期的なシーソー攻略方法であるスイッチバック走行です!
2018年に数々のチームの栄光への道を阻んだ難所”シーソー”が、2019年度のコースにも引き続き設定されていました。そんな難易度の高いシーソーが待ち構えているにもかかわらず、大会当日の朝、私たちの心は非常に落ち着いていました。なぜなら、スイッチバック走行を考案したことで、シーソー攻略に大きな自信を持っていたからです。
しかしCS大会本番、Lコースのシーソー昇段中に転倒してしまい、スイッチバック走行をお披露目することができませんでした…。
競技中は精神的な効果をもたらしてくれたのみにとどまってしまったスイッチバック走行ですが、スイッチバック走行の新規性の高さと、モデルシート上で詳細にその動きについて説明できたことが評価され、モデル部門で「見るべきモデル賞」を獲得することができ、その存在感を大きく見せつけてくれたのです。
とはいえ先ほども述べたように、本番では私たちのチームはスイッチバック走行をお披露目する前に転倒してしまったため、見るべきモデル大賞の選定理由を聞かれた方々には何のことだかさっぱりわからないと思います。そこで今回は、謎に包まれている画期的なシーソー攻略方法「スイッチバック走行」について紹介したいと思います。
スイッチバック走行とは――画期的なシーソー攻略方法の誕生秘話
当社は毎年、新入社員だけでロボコンチームを結成しています。私たちの先輩チームに当たるtadaima G3は昨年度のCS大会本番競技中、シーソーの傾きを誤検知し尻尾をシーソーが傾く前に動かしてしまったため転倒し、優勝を逃してしまいました。
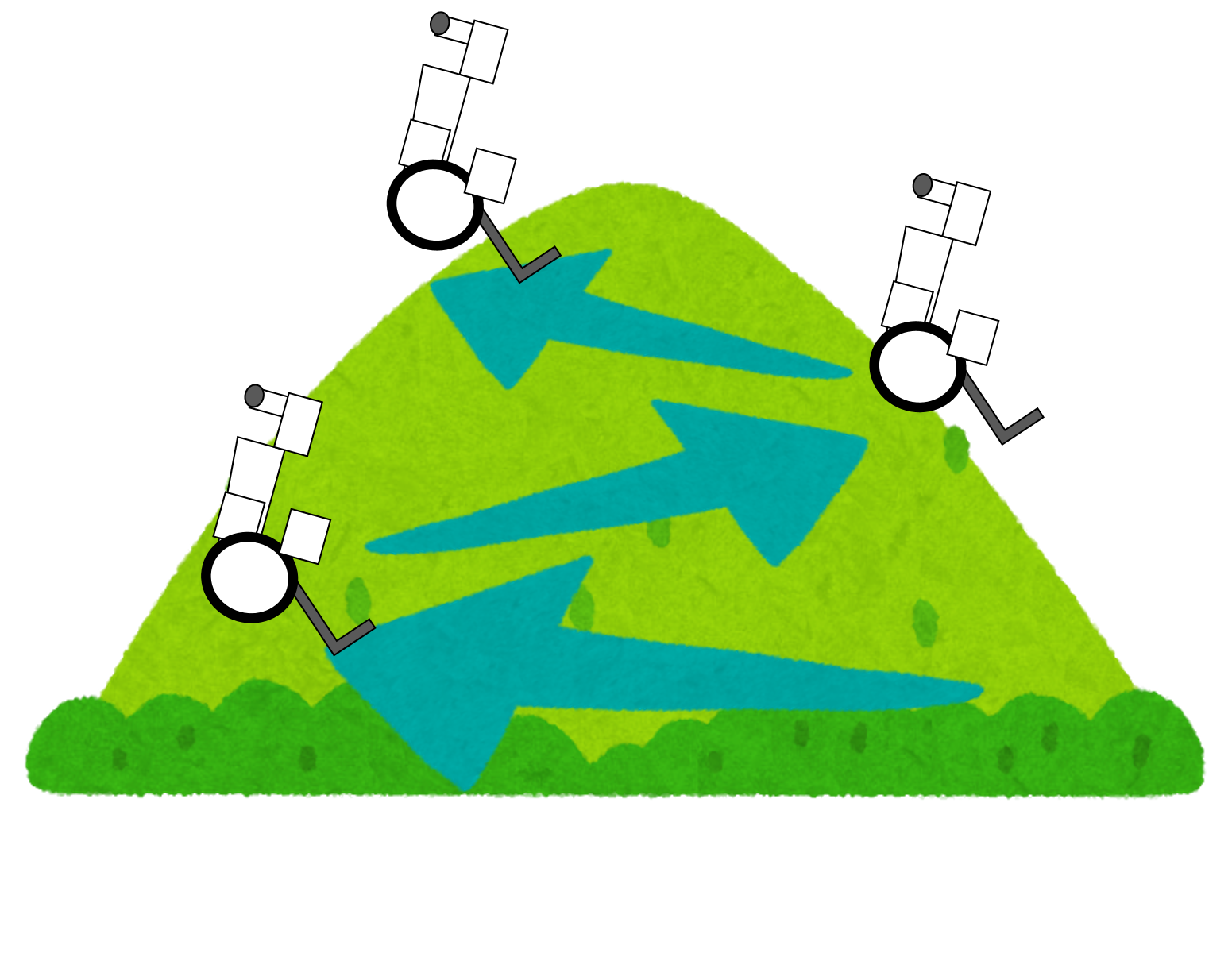
その課題に対して私たちtadaima G4は、シーソー上での傾きの変化に合わせて尻尾を動かすのではなく、尻尾を固定したままシーソーの傾きの変化に対応できるよう、シーソー上で横を向く方法を考えました。横を向きながら進むための手段として考えたのが、ジグザグに進むスイッチバック走行です。
スイッチバック走行イメージ図
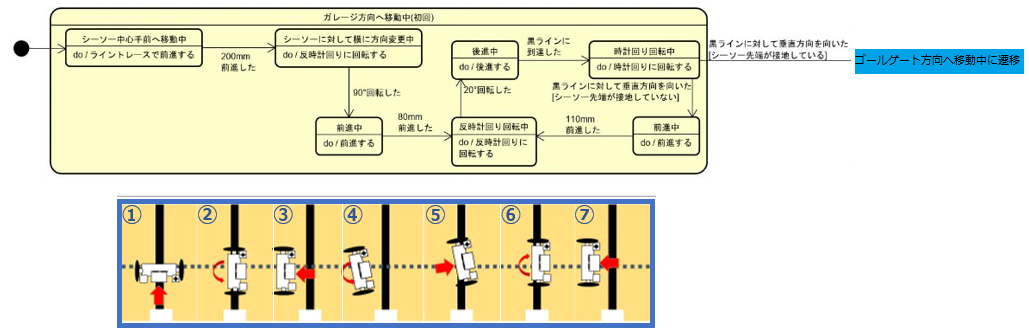
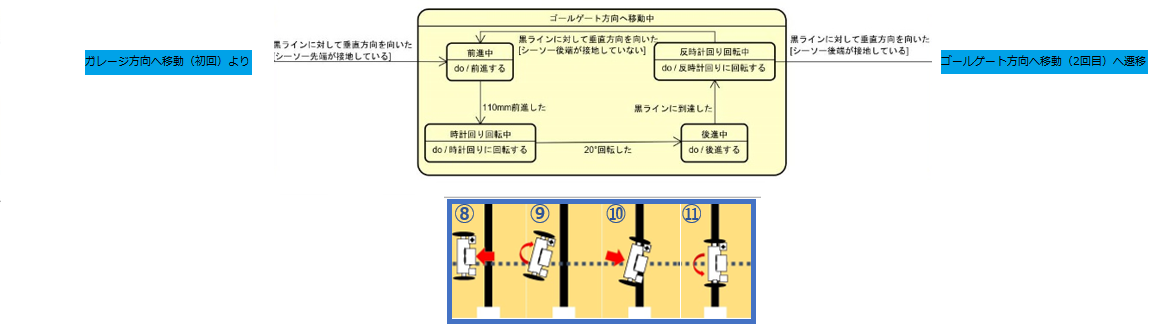
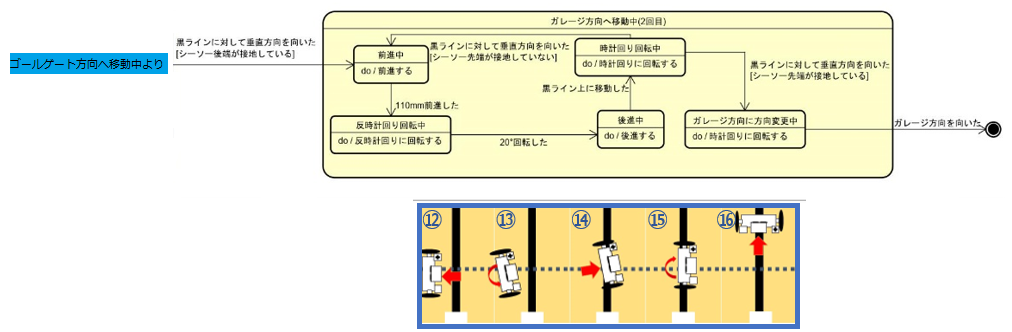
スイッチバック走行の動きの一連をわかりやすいように、ステートマシン図とロボットの動きを表したイラストを併記します。
実装を通して浮き彫りになった課題とその対策
上記の動きをそのまま実装したところ下の動画のように、シーソー上で横向きを維持することができませんでした。
ロボットが尻尾を地面につけている際、ロボットは少し後ろに傾いているため、ロボットの重心は上から見たときに、車輪よりも少し後ろにあります。そのため、徐々にシーソーの接地していないほうの端を向いてしまったと考えられます。
シーソーに対して横向きを維持するために、下記の数式を解き全体の動きの⑥⑪⑮の際に回転させるべき角度を求めました。
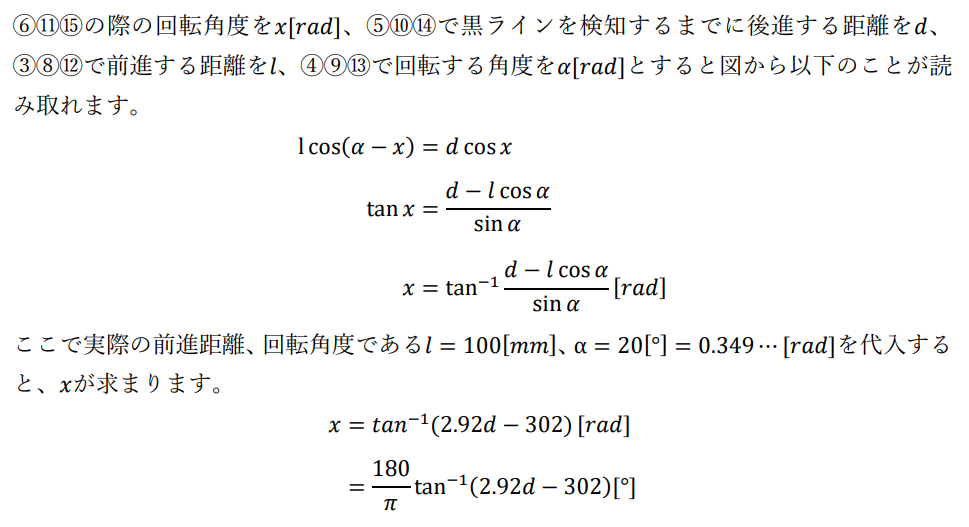
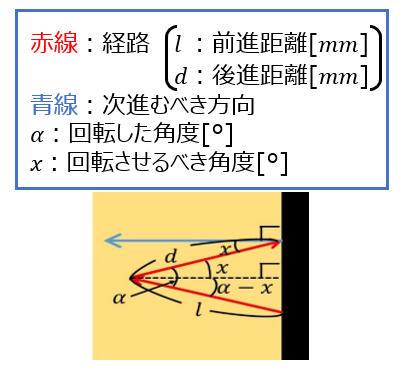
全体の動きの⑥⑪⑮の際に回転する角度に上記の式から求まる値を適用したところ下記の動画のようになりました。長いので2つの動画に分かれています。
正面を向くことなくシーソー上をジグザグに進むことができるようになりましたが、シーソーが1度傾いてから逆方向に傾かせるためには長い距離を移動しなくてはならないので、動画外の時間も合わせてシーソー上だけで5分もの時間がかかってしまっています。これでは、ETロボコンの規約に定められている競技時間2分を超えてしまいます。
そこで私たちはシーソー上での時間を短縮するために下記の3つの方法を試しました。
- 傾き検知後に大きく方向を変え、シーソー中心付近まで移動した後、再度スイッチバック
- スイッチバックでシングル(※)
- 1度目の先端接地,後端接地は正面を向いた状態で行い、その後中央付近まで移動して横を向いてからスイッチバック
※ETロボコンの規約上、シーソーを傾けた回数によって点数が加算されます。「シングル」は、シーソーを1度傾けることを表し、後述の「ダブル」は、シーソーを1度傾けた後、元の状態に戻してからもう1度シーソーを傾けることを表します。
1. 傾き検知後に大きく方向を変え、シーソー中心付近まで移動した後、再度スイッチバック
まず最初に、傾き検知後に大きく方向を変え、シーソー中心付近まで移動した後、再度スイッチバックをする方法を試してみました。こうすることでシーソーが傾いてからシーソー中心付近まで移動する時間を大幅に短縮することができます。
もくろみ通り大幅な時間短縮には成功しましたが、上記の動画のようになかなか安定せず、手で支えながらでないとめったにシーソーダブルを達成することはできませんでした。
2. スイッチバックでシングル
1. の方法ではなかなか安定してシーソーダブルを達成することができなかったので、地区大会にはシーソーシングルを達成するためのスイッチバックを準備していきました。下記の動画が地区大会の試走でのシーソーの動画です。
しかし、地区大会の本番ではLコースの基本走行でコースアウトしてしまい、お披露目することはできませんでした。
3. 1度目の先端接地,後端接地は正面を向いた状態で行い、その後横を向いてからスイッチバック
2019年度のETロボコンのルールではL,Rコースのどちらか早い方のタイムがリザルトタイムとなり、2019年度のコースの特性としてLコースのほうがショートカットしやすく基本走行で良いタイムを出しやすかったので、CS大会で上位を目指すには、Lコースにあるシーソーをダブルでクリアする必要があると考えました。
そこで地区大会終了後に、1度目の先端接地,後端接地は正面を向いた状態で行い、その後中央付近まで移動して横を向いてからスイッチバック方式を行う方法を試しました。この方法により、基本走行、シーソー、ガレージ(ゴール地点の停止場所で、規約通りに停止すると点数が加算されます)の全部を合わせて約1分55秒程度と何とか競技時間に間に合うようになりました。
結果的に正面を向いて攻略する方法も実装することになったのですが、3度目のシーソーの傾きを安定して耐えることができると思えば十分です。
最終的に私たちtadaima G4はCS大会にこの対策を施したスイッチバック走行を準備していきました。下記の動画がCS大会の試走での動画です。
しかし、残念ながら本番ではシーソー昇段で転倒してしまい披露することはできませんでした。
スイッチバック走行のメリットとデメリット
上記の通りスイッチバック走行と正面を向いたままシーソーを攻略する方法の二つを実装したので、正面を向いた状態と比較したスイッチバック走行のメリット、デメリットを下記にまとめます。
メリット
- シーソー板接地の衝撃に耐えやすい
- ジャイロセンサーの閾値の設定に悩まされない
- ラインを見失いにくい
- 斬新な動きなのでモデルシートでその動きとメリットを詳細に説明できた場合に高い評価を獲得できる
- 珍しい動きなので競技中に目立つ
デメリット
- 実装に時間がかかる(昇段後に横を向く動きなど意外と実装が難しい)
- シーソー攻略に時間がかかる
上記のメリット・デメリットを考慮すると、2019年度のシーソーは2018年度のシーソーに比べシーソー板接地の衝撃が軽減されたようで、今年度のルールにおいてはスイッチバック走行は最適解でなかった気がします。
不安定なシーソー上でいろいろ工夫してみたので、もし、今後の難所等で似た動きで攻略できるような場面があったら、参考にしてみてください。
終わりに
今回は、ETロボコンの本番中にお披露目できなかった幻のシーソー攻略方法「スイッチバック走行」について紹介しました。競技部門では披露することができませんでしたが、見るべきモデル大賞を受賞できたのはスイッチバック走行のおかげだと思っています。スイッチバック走行について、本記事にパラメーターなどの詳細な情報をまだまだ書ききれていないので、挑戦したいという方はぜひ下記の連絡先までご連絡ください。
また、当社は毎年、他社との合同試走会や合同勉強会を行っています。一緒に合同試走会や合同勉強会を行いたいという方もぜひ下記の連絡先までご連絡ください。お待ちしております。
連絡先:tdi-robocon![]() g.tdi.co.jp
g.tdi.co.jp

執筆者プロフィール

- tdi AI&データマネジメント推進部
- tdiロボコンチーム"tadaima G4"の一員として、ITAロボコン優勝、ETロボコンCS大会3位、見るべきモデル大賞に貢献。AI勉強中。





